
 Click it and Unblock the Notifications
Click it and Unblock the Notifications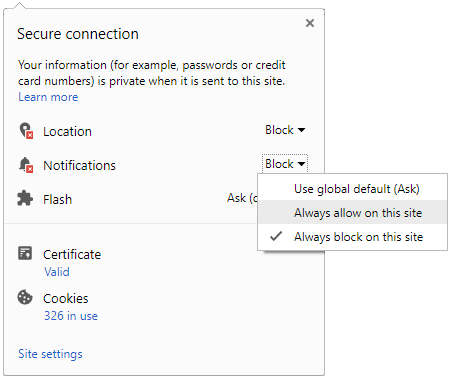

Autonomous Navigation for Flying Robots is a free online course conducted by the Technische Universität München (TUM), a German University.
About the course
In this course, students shall learn how to infer the position of the quadrotor from its sensor readings and how to navigate it along a trajectory. Students shall be introduced to the basic concepts for autonomous navigation for quadrotors. The following topics will be covered:
- 3D geometry,
- probabilistic state estimation,
- visual odometry, SLAM, 3D mapping,
- linear control.

This course is intended for undergraduate and graduate students in computer science, electrical engineering or mechanical engineering. This course has been offered by TUM for the first time in summer term 2014 on EdX with more than 20.000 registered students of which 1400 passed examination. The MOOC is based on the previous TUM lecture "Visual Navigation for Flying Robots" which received the TUM TeachInf best lecture award in 2012 and 2013.
Course Begins: May 5, 2015
Course Length: 8 weeks
For further information and to register, click here.












Just In




Don't Miss
-
 Whistleblower Exposes China's Influence Tactics, Alleges UN Cover-Up Of 'Special Favours': Report
Whistleblower Exposes China's Influence Tactics, Alleges UN Cover-Up Of 'Special Favours': Report -
 Dubai Grapples With Severe Flooding Amid Heavy Rainfall
Dubai Grapples With Severe Flooding Amid Heavy Rainfall -
 Summer Fashion: 6 Tips For Embracing Layering Styles To Keep It Cool And Stylish
Summer Fashion: 6 Tips For Embracing Layering Styles To Keep It Cool And Stylish -
 Abhradeep Saha Death: Who Was YouTuber Angry Rantman? All About His Age, YouTube Channel & Followers
Abhradeep Saha Death: Who Was YouTuber Angry Rantman? All About His Age, YouTube Channel & Followers -
 Traffic Incoming! Hebbal Flyover's Up-Ramp In Bengaluru Closed To Vehicles Except Two-Wheelers
Traffic Incoming! Hebbal Flyover's Up-Ramp In Bengaluru Closed To Vehicles Except Two-Wheelers -
 Google Wallet is Coming to India Soon: Listing Appears on the Play Store
Google Wallet is Coming to India Soon: Listing Appears on the Play Store -
 GT vs DC My11Circle Prediction IPL 2024 Match 32: GUJ vs DEL Fantasy Tips & Expert Picks
GT vs DC My11Circle Prediction IPL 2024 Match 32: GUJ vs DEL Fantasy Tips & Expert Picks -
 From Coconut Breaking on Head to Men Dressing as Women: 12 Unique Indian Rituals Explored
From Coconut Breaking on Head to Men Dressing as Women: 12 Unique Indian Rituals Explored


